
How to use micropython.schedule effectively
https://forum.micropython.org/viewtopic.php?t=8745
from pyb import Timer import micropython import time def cb(arg): # Scheduled callback print(arg) def cb1(tim): # Hard IRQ micropython.schedule(cb, 'Timer 1') def cb2(tim): micropython.schedule(cb, 'Timer 2') t1 = Timer(1, freq=1.1, callback=cb1) t2 = Timer(2, freq=1, callback=cb2)
Cartridge PCB example: https://github.com/JayesonLS/TandyCircuitsAndLogic/blob/master/CoCoProtoBoard/CoCoProtoBoard.png
{kind=link}
Coco Motherboards: https://github.com/qbancoffee/coco_motherboards
halt/, E, A0, A1 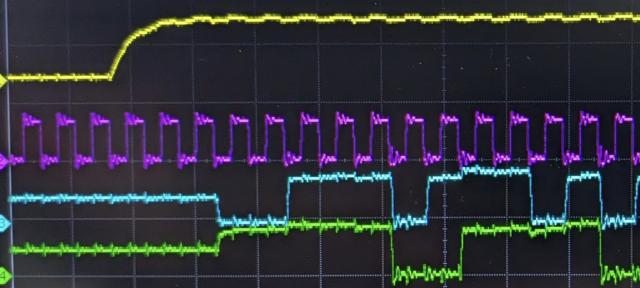
halt/, E, A0, A3 (?)
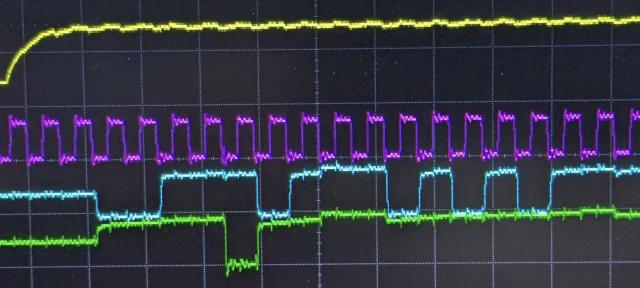
]strick9: So that's the pic I wanted with fetching the reset vector after reset/ rises then halt/ rises [2:57 PM]strick9: programmed the delay in MicroPython GPIO (not PIO) import time from time import sleep import machine from machine import Pin Led = Pin("LED", Pin.OUT) Halt = Pin(13, Pin.OUT) Slenb = Pin(14, Pin.OUT) Dir = Pin(15, Pin.OUT) ResetN = Pin(8, Pin.IN) EClock = Pin(9, Pin.IN) WriteC = Pin(10, Pin.IN) WriteD = Pin(11, Pin.IN) ReadD = Pin(12, Pin.IN) Led.value(1) Halt.value(0) Slenb.value(0) Dir.value(1) while True: while ResetN.value() == 0: pass print("^", end="") sleep(0.9) Halt.value(0) while ResetN.value() != 0: pass print("v", end="") Halt.value(1) sleep(0.2)[2:59 PM]strick9: Scope will trigger on rise in Halt: Type Dropout, Source Ch1=yellow, Slope Rising, OverTIme Type Edge, Time 2ns
Spoonfeeder

